


水下机器人技术研究室
中科院沈阳自动化所是国内外有影响的研究与开发水下机器人并形成产品的科研实体之一,我国第一台有缆遥控潜水器和第一台无缆自治水下机器人都是在这里诞生的。从某种意义上说,中科院沈阳自动化所在水下机器人各阶段的技术成果代表了我国在这一技术领域的发展历程。
水下机器人研究室主要从事水下机器人的研究、技术开发、生产和示范应用。在水下机器人基础理论与方法方面,主要研究方向包括载体设计理论、自主控制理论、布放和自动回收方法、水下对接方法,以及新型水下机器人、仿生水下机器人、特种水下机器人、多水下机器人系统的理论与方法。在技术开发方面,主要面向海洋探测、资源开发、极地科考和水下安全等国家重大需求研制具有特定使命的水下机器人系统。此外,水下机器人研究室还具有生产大、中、小型水下机器人系列产品的能力,并面向国内外用户提供各种水下工程作业服务。
水下机器人研究室现有固定科研人员七十余人,其中包括中国工程院院士1人,研究员13人以及一批中青年高级科技人员;现有流动人员近50人,其中包括1名客座研究员,40余名博、硕士研究生和若干名项目聘用人员。所涉及的专业包括:自动控制、计算机、机械、流体力学、船舶、电机、声学等。
水下机器人研究室具备齐全、先进的水下机器人试验设备和条件。4个深水模拟压力罐可分别进行1000米、1500米、7200米和和10000米水深的水下模拟试验。长20米、宽12米、深9米的试验水池以及相配套的各种调试、吊装设备和仪器仪表、环境试验装置等,可进行各种水下机器人整机调试和功能试验。由多套水下机器人半物理仿真平台、多水下机器人仿真系统、水下机器人优化设计平台等组成的数字仿真实验室可为水下机器人开发提供各种专用平台。
水下机器人研究室在水下机器人研究和开发过程中一贯采取开放、合作的工作模式,与美国、俄罗斯、意大利的一些研究单位和公司有着良好的合作经历和关系,与国内相关优势单位形成了友好、有效的合作网络。水下机器人研究室将继续加强与国内外的合作,广泛吸引优秀人才,争取和完成国家重大科研项目,继续保持国内水下机器人技术的领先地位,争创国际知名的一流研究和开发单位。
水下机器人研究室部分代表性研究成果
(1)水下机器人基础理论与方法
过去的三十多年来,水下机器人研究室在水下机器人基础理论与方法研究方面取得了丰硕的研究成果,在水下机器人运动控制、智能决策、路径规划、组合导航、集群控制、自主作业、载体设计、作业工具、释放回收等方面发表了一大批高水平学术论文或申请了国家发明/实用新型专利,研究出多种仿生、新概念水下机器人样机,如集AUV和ROV技术特点于一身的新型水下机器人ARV(如图1)和一种无外挂推进装置、依靠自身浮力驱动的水下滑翔机器人(如图2)等。

图1 ARV
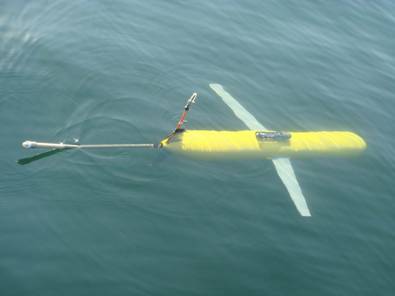
图2 水下滑翔机器人
附件下载:




