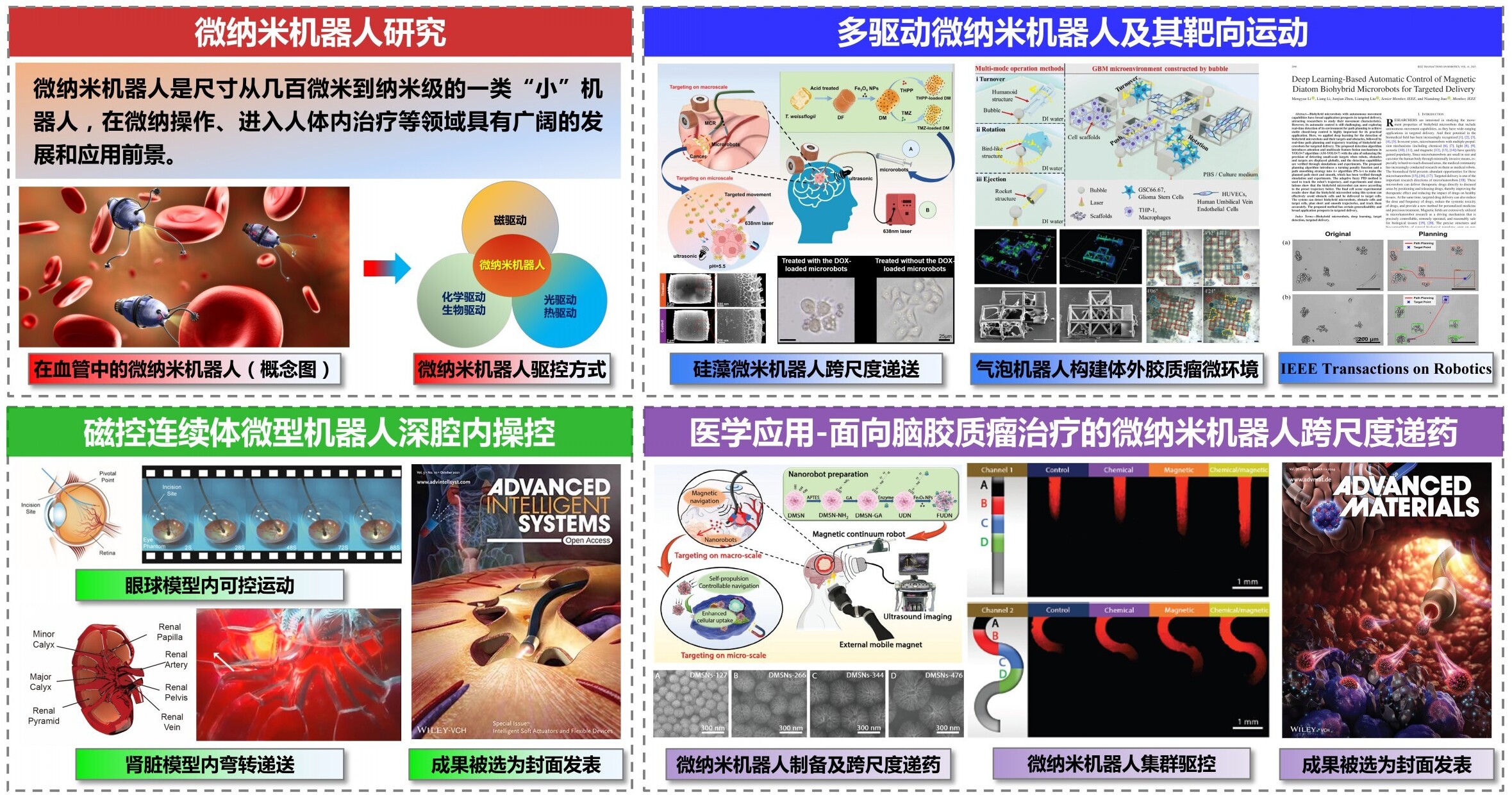
微纳米机器人(micro-nano robots)是尺寸从几百微米到纳米级的一类“小”机器人,在微纳操作、进入人体内治疗等领域具有广阔的发展和应用前景。本研究方向主要研究微纳米机器人相关基础理论及实现方法,研究微纳米机器人的制备及多种驱控方式(磁、光、化学、生物驱动等),通过算法实现其智能化与自动控制。结合人体典型疾病(如颅内胶质瘤),探索微纳米机器人集群进入人体内部狭小腔道对肿瘤等病灶进行探测、诊断和治疗的新原理、新方法。推动相关研究成果在微纳操作、无创/微创治疗、血管内监测、靶向治疗等方面的临床应用,使微纳米机器人技术造福社会。(研究方向负责人:焦念东,研究员,博导,邮箱:ndjiao@sia.cn)


 关注微信公众号
关注微信公众号