近日,科技部国家重点研发计划“智能机器人”重点专项“高海拔环境科考站辅助值守机器人”项目根据任务指标需求,由项目承担单位中国科学院沈阳自动化研究所和主要应用验证单位中国科学院青藏高原研究所共同组织实施了高海拔科考站及高原环境现场考察调研活动,并随后在南开大学召开了座谈研讨会,该项目各参加单位代表参与了此次调研、研讨活动。活动中,项目组先后赴中国科学院纳木错多圈层综合观测研究站(以下简称纳木错站)、中国科学院藏东南高山环境综合观测研究站(以下简称藏东南站)、以及廓琼岗日冰川进行了现场考察。纳木错站海拔4730米,是我国海拔最高的科考站,地处纳木错湖边,与念青唐古拉山脉相邻,周围包含丰富的冰川、河流、冻土、季节积雪、湖泊、高寒草原(草甸)、湿地等自然地理要素,是研究青藏地区生态系统之间互相耦合的重要科考站;藏东南站毗邻雅鲁藏布江大峡谷,海拔3300米,是监测水热组分传输过程及其对地表景观影响的重要台站,为全球变化下山地地表过程和环境效应研究提供了宝贵的观测数据;廓琼岗日冰川位于西藏当雄县,最高海拔超过5500米,集冰川、湖泊、草甸为一体,是青藏地区的典型的冰川地貌,对当地的生态具有重要影响。
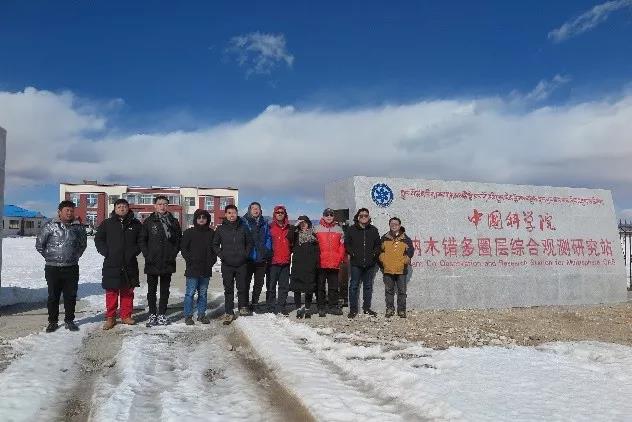
考察纳木错站

考察藏东南站

海拔5400米的冰川

在高海拔区合力解救汽车
项目组成员克服了严重的高原反应,与科考人员进行了细致深入的交流,了解了科考站的主要科考任务,对相关科考活动、当前科考手段以及现有科考设备形成了初步认识,并着重探讨了高海拔科考面临的核心挑战与困难。此次现场考察使项目组对高海拔科考任务有了更加深入和直观的理解,充分了解了机器人技术在高海拔科考中的潜在应用。同时,高海拔环境产生的高原反应,让项目组成员更深刻地认识到发展面向高海拔科考的机器人装备的紧迫性和重要性。
随后,项目参加单位代表于2019年12月15日在南开大学对本次调研结果及下一步工作进行了讨论,会议同时邀请了“智能机器人”重点专项专家组副组长韩建达予以指导。


座谈会首先对本次高海拔环境考察及调研结果进行了总结和汇报,并根据用户单位的需求对机器人的高海拔科考任务进行了进一步细化,确定了各任务的详细方案;同时细化了各项目参加单位的工作计划,进一步明确了项目研究重点和协调机制。会上,韩建达副组长充分肯定了项目组前期的组织工作,并重点强调了在项目后续实施过程中要充分将机器人的优势和高海拔科考的具体任务需求紧密结合,争取早日为我国青藏科考提供可靠的高技术装备,为减轻科考人员的工作负担、加速我国高海拔科考活动的智能化、无人化发展进程贡献力量。