


沈阳自动化所科研团队研制自感知刚柔耦合抓手系统
基于自感知折纸驱动器的刚柔耦合抓手系统构成
面向多类典型物体的抓取适应性验证
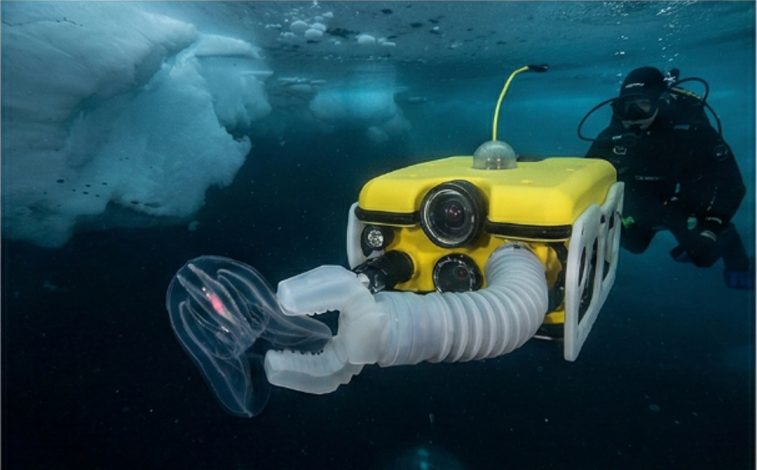
未来极地科考应用场景
近日,中国科学院沈阳自动化研究所机器人学研究室科研团队在刚柔软共融机器人设计与控制研究方面取得新进展,提出了一种基于自感知Kresling折纸驱动器的刚柔耦合抓手系统,为多功能、高集成度作业机器人系统设计提供了新思路。
该系统利用折纸结构的独特几何特性,通过单一电机驱动即可同时实现流体驱动和机械驱动,大幅降低了系统的复杂度。同时,科研团队在折纸模块内部嵌入了磁传感系统,建立了解耦感知模型,实现了对驱动器高度和旋转角度的实时高精度本体感知。此外,通过集成的电磁锁紧机构,刚柔耦合抓手可在“柔顺抓取模式”和“大负载混合模式”之间毫秒级切换。
科研团队搭建了实验平台,对刚柔软耦合机器人的抓取性能和抗扰动能力进行了系统评估。实验结果表明,相比于单一柔性模式,开启刚性外骨骼的混合模式将指尖输出力提升了311%,实现了对重物和大负载物体的稳定抓取;同时,基于内嵌感知的闭环控制,可有效提升系统在非结构化环境下的适应能力。
上述研究成果以A Soft-Rigid Coupled Gripper Driven by a Self-Sensing Origami Actuator for Compliant and Robust Grasping 为题,发表于机电一体化领域国际期刊 IEEE/ASME Transactions on Mechatronics,张道辉副研究员、赵新刚研究员为通讯作者。该研究得到了国家重点研发计划、国家自然科学基金重大研究计划等项目的支持。
该研究旨在利用刚柔模态切换优势解决刚柔性物体的无损操作难题,相关技术有望在今后的极地科考等场景下获得应用。(机器人学研究室)
附件下载:




